|
用渦旋原理減小(xiǎo)流體黏性對浮子(zǐ)流量傳感器測量(liang)⚽影響
|
摘要:爲了減(jiǎn)小黏性流體對浮(fú)子流量傳感器
測(cè)量的影響,本文采(cǎi)用優化浮子結構(gou)的方法來設💞計黏(nián)性不敏📐感浮子傳(chuán)感器,運用計算流(liú)體力學(CFD)的方法對(duì)測量黏性介質的(de)浮子流量傳感器(qi)進行了數值仿💃🏻真(zhēn),在仿🔞真分析的基(ji)礎😘上,,發現流體在(zai)邊界層分離産生(sheng)的渦旋流場可以(yi)減小黏性對浮子(zi)流量傳感器測量(liàng)的影響,研究分析(xi)了利用渦旋場減(jian)小流體黏性影響(xiǎng)的機理與減黏浮(fu)子結構的特征;同(tóng)時設計制造了利(li)用渦旋效應實💯現(xiàn)減黏的浮子流量(liang)傳感器,利用黏♉性(xing)物理實驗對減黏(nian)浮子的減黏效果(guǒ)進行了驗證,具有(you)減黏效果的浮子(zǐ)流量傳感器在1-495mPa.s的(de)黏性範圍内,介質(zhì)黏性所引起的測(ce)量誤♉差可控制在(zai)2.9%以内.
1概述
利用浮(fu)子流量傳感器對(duì)流體的測量過程(cheng)中,經常✊會涉及到(dao)對黏性流體的測(cè)量,當實際測量工(gōng)作介質的黏度與(yǔ)标👌定介質的黏度(dù)不同時,黏性就會(huì)影響流量測量的(de)正确率。針對這個(ge)問題,國内外許多(duō)學者作了大量的(de)研究,這些研♊究從(cóng)方法上講可分爲(wei)兩大類,一🌍類研究(jiu)着眼于對現有的(de)浮子流量傳感器(qì)通過實驗💞找出其(qi)黏性修正曲線;另(lìng)一類着重🔞于盡可(kě)能消除黏性影響(xiang)㊙️的浮子傳感器結(jie)構設計🛀。
由于利用(yong)黏性修正曲線消(xiao)除黏性影響隻能(neng)在被測黏度爲常(cháng)數或掌握其黏度(du)變化規律的情況(kuang)下,才能對黏性影(yǐng)響流量示值進行(háng)修正。而在對浮子(zi)傳感器🏃🏻結構優🐪化(hua)方面:FisherK首先提出在(zài)标定中忽略黏性(xìng)影響的設計[5],此後(hòu)Miller.R.w給出一系列特殊(shu)結構的浮子形狀(zhuang),,指出這些浮子具(ju)有黏度不敏感上(shàng)限值,在此❗黏度限(xian)制以下💯時,不需要(yao)進行黏度校正。但(dan)在他們💃的工作中(zhōng)并沒有指出浮子(zǐ)流量傳感器黏性(xing)不敏感的工作原(yuan)理和适🏃♀️應的黏度(du)範圍。
本文試圖找(zhao)到能夠減小流體(ti)黏性對測量影響(xiang)的💃🏻浮子流量傳感(gǎn)器結構,并分析總(zong)結減黏的機理,爲(wei)優化浮子㊙️結構提(ti)供理論基礎。由于(yú)在工業中使用🚶♀️測(cè)量黏性溶液的浮(fu)子流量傳🏃🏻♂️感器多(duō)🌈是耐高溫耐高壓(yā)的金🔱屬浮子流🌈量(liang)傳感器,所以用流(liu)動顯示的🐪實驗方(fang)法來研究浮子流(liu)量傳感器機理既(ji)不易觀察到浮子(zi)内部流場的變化(hua),也增加了研發的(de)費用。鑒于此,本🔴文(wen)采用CFX軟件對測量(liàng)黏性介質的浮子(zi)流量傳感器内部(bu)流場🌈進行了數值(zhí)模拟🤩,通過對仿真(zhēn)⛱️結果的分析,提出(chū)減小🏃♀️黏性對浮子(zǐ)流量傳感器影響(xiǎng)方法,并最終研制(zhì)出受黏度影響小(xiǎo)的❤️減黏浮子。
2浮子(zǐ)流量傳感器的基(jī)本結構
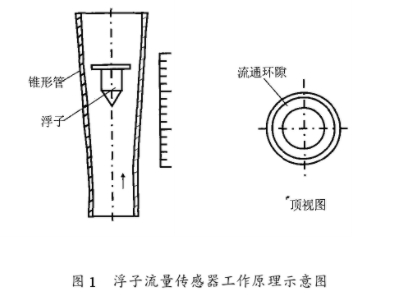
浮子流量(liang)傳感器基本結構(gòu)如圖1所示,在垂直(zhi)的錐形😍管中放🈚置(zhì)一阻力件,也就是(shì)浮子。當流體自下(xia)而.上流過錐管時(shí),由于✉️浮子的阻塞(sai)作用使其上下表(biǎo)面産.生了壓差,從(cong)而對浮子形🚶成一(yī)個向上的作用力(li),如果所測流體是(shi)黏性流體,還應該(gāi)考慮浮子表面的(de)黏性摩擦力。當升(shēng)力🧡大于浮子本身(shēn)的重力時,浮子向(xiang)上運動,此時浮子(zǐ)與錐形管之間的(de)環🌂通面積增大,流(liú)速減.低,浮子對流(liú)體阻力作用減小(xiǎo)。當浮子受到的力(lì)達到平衡時,浮子(zi)就會停🏃留在某一(yī)高度
3計算流體力學方(fāng)法的應用
本文計(jì)算中使用的控制(zhì)方程爲RANS方程,選用(yong)工程中常用的Standardk-ε模(mó)型作爲流場計算(suàn)的湍流模型。爲了(le)簡便,以不🙇♀️可壓縮(suo)湍流流動爲例寫(xie)出仿真使用的k-ε模(mo)型通用形💁式的流(liú)體控制方程。在直(zhí)角坐🔴标系中,流動(dòng)可由如下的雷諾(nuo)時均N-S方程.和連續(xù)性方程來描述🌈。
連(lian)續方程:
其中Ui爲平(píng)均速度,P爲平均壓(yā)力,ʋ和ʋt,分别爲分子(zi)黏性系數👅和渦黏(nián)性系數,對高Re數湍(tuan)流,渦黏性系數由(yóu)下式決定:
别爲湍(tuan)動能産生項和平(píng)均應變率張量。
同(tóng)時爲了能夠動态(tài)仿真浮子流量傳(chuán)感器的測量原理(lǐ),使浮子可以根據(jù)受力變化自動調(diào)整其在錐管中的(de)位置,本文根據牛(niú)👉頓第二定律,得到(dào)浮子上下移動的(de)控制方程;

其中F.爲(wei)浮子表面壓力差(cha),FV爲浮子所受到的(de)黏性力💋,G爲浮子受(shòu)到的重力,m是浮子(zǐ)自身的質量,△t爲計(jì)算叠代前後的時(shí)間😍差,△u計算叠代前(qian)後的速度差,計算(suàn)中把相對速度轉(zhuan)化爲相💛對位移來(lai)控制.浮子的升降(jiang),直到被計算的浮(fú)子所受到的合力(lì)到達平衡。
4流場仿(páng)真與機理分析
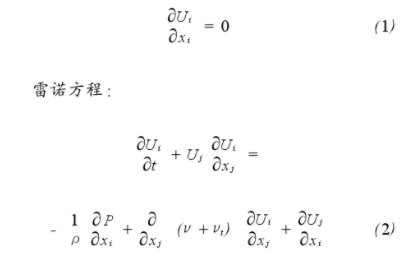
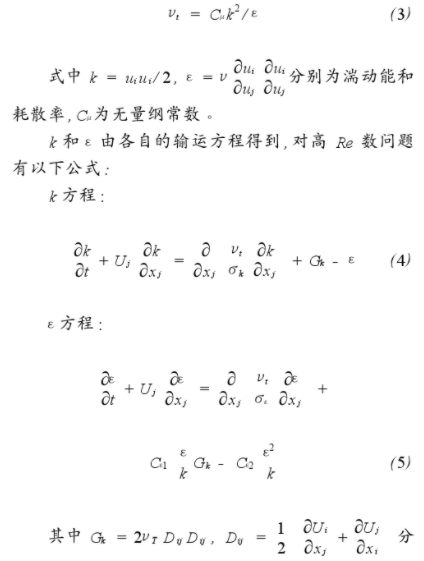
仿(pang)真過程中建立了(le)浮子流量傳感器(qì)結構模型,如圖㊙️2所(suo)示。爲了提高浮子(zi)流量傳感器入口(kǒu)仿真效果,仿真按(àn)照尼古拉茲圓管(guǎn)速度剖面公式給(gěi)出如圖3所示浮子(zi)流量傳感器入口(kǒu)速🤩度剖面,圖中色(se)标由冷色調變化(huà)到暖色🙇🏻調表示流(liú)體速度由小到大(dà),從僞色圖中可以(yi)看到從邊壁到中(zhong)心的速度是由小(xiao)到大非線性🚩分✉️布(bu)的。爲了清楚說明(ming)浮子流量傳感器(qi)的仿真過程圖4給(gěi)出測量黏性流㊙️體(ti)浮子流量傳感✌️器(qì)仿真計算的.流程(cheng)簡圖。
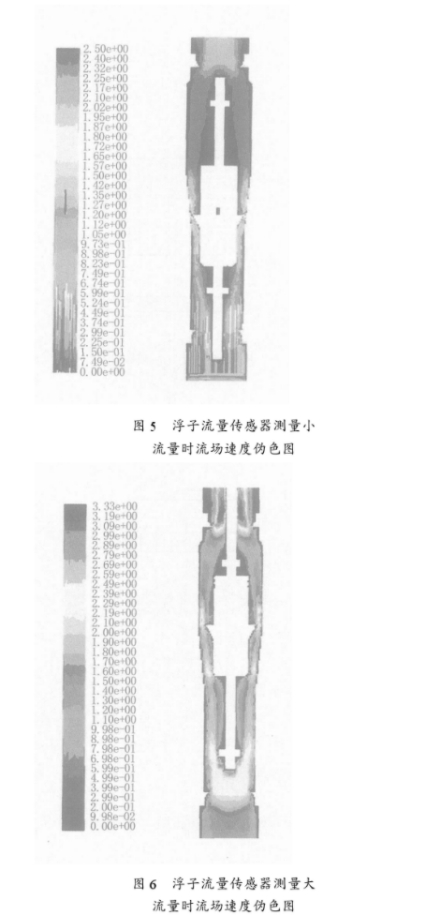
通過仿真,分(fen)别得到小流量和(he)大流量入口流量(liang)條👣件下的傳感器(qi)速度剖面僞色圖(tú),如圖5、圖6所示。圖中(zhōng)可以清楚✌️看到傳(chuan)感器中流體在浮(fú)子周圍以及出入(rù)口的❌速度分布。随(sui)着流量的增加,浮(fu)子的位置上🔅升,浮(fu)子與錐管之間環(huan)隙變大🛀,流體在錐(zhui)管中的速度分布(bù)也随♉之發生明顯(xian)的變化,據此可以(yi)定性判斷出計算(suàn)所得結果是合理(lǐ)的。
爲了研究流體(ti)黏性摩擦力對浮(fú)子表面受力的影(ying)響,仿真計算了浮(fú)子表面受到的沿(yán)流向黏性摩擦力(lì)等值線圖,如💋圖7所(suo)示,圖中可以清楚(chu)的看到在浮💜子最(zuì)大截面之前的浮(fu)子表面有淺綠色(sè)的黏性摩擦力色(se)帶區,它說明浮子(zǐ)的前端受到了較(jiao)大沿流向的黏性(xing)力影響,而在最大(da)截面後部的浮子(zǐ)表面上出現了深(shēn)藍色的黏性力色(sè)📐帶,這說明此處浮(fu)子表面所受到的(de)黏性摩擦🍉力爲負(fù)值,即黏性力作用(yòng)的🔆方向反向于流(liú)體流向,這種現象(xiàng)在一📧定程度上減(jiǎn)小了黏性流體黏(nián)性力對浮子傳感(gan)器的影響。通過觀(guān)察流體在通過最(zuì)大截面時的速度(du)矢量圖,如圖8所示(shì),可以♍發現渦旋作(zuò)用是造成浮子在(zai)最大截面後部出(chu)現負黏區的主要(yao)原🏒因🚶。
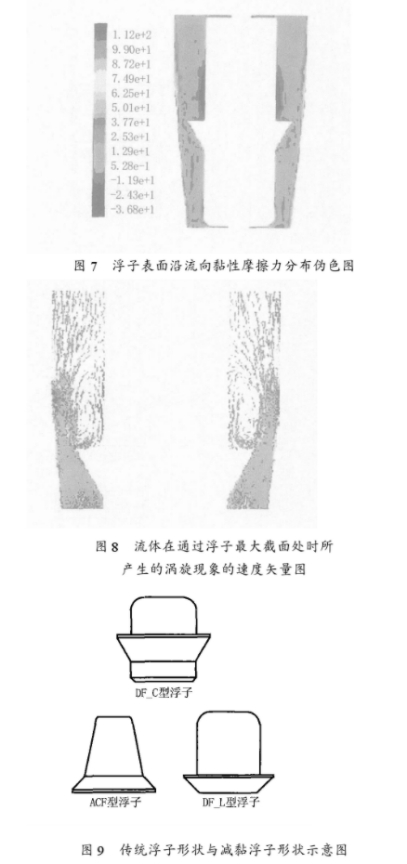
根據邊界層(ceng)理論,由于黏性而(er)使物面邊界産生(sheng)邊🌐界😍層,當黏性流(liú)體流過浮子最大(da)截面而後突然流(liú)動‘分離”。這樣産生(shēng)的🈲分離⚽層迅速形(xíng)成一個或多個渦(wo),這樣的渦可🈲以滞(zhì)留在物體後部。也(yě)就是說,流體流經(jing)浮子㊙️與管壁之間(jian)的環隙時,環隙速(sù)度增大,流🔴體在截(jié)面内均勻分布,當(dang)截面沿流動❤️方向(xiàng)突然增大的時候(hòu),由㊙️于分離形成了(le)滯留在浮子最大(da)截面🔆後部的渦流(liú)區,從而形成🔴逆流(liu),使浮♌子整體表面(mian)所受到黏性摩擦(ca)力在流動方向上(shang)減小,甚至與浮子(zi)上升方向相反,這(zhe)樣就部分抵🈲消了(le)黏性帶來的影響(xiǎng)。根據以上分析,本(běn)文提出利用流體(ti)邊界層提前👈分離(lí)産生的渦旋區實(shí)現浮子減黏的方(fang)案,其中包🔞括:最大(dà)截面之前的浮子(zi)👄表面積越小,沿流(liu)向的正黏性力作(zuo)用區域越小;迎流(liu)面的邊緣越👉鋒利(lì),分離點越靠前,分(fèn)離🚶造成的渦旋效(xiào)果越顯著;分離所(suo)産生渦旋場中的(de)浮子表面積越大(da),浮子受到負黏性(xìng)摩擦力越大。
根據(jù)仿真研究得到的(de)減黏規律,本文在(zài)原有基本浮子(DF_C型(xíng)☎️)形狀的基礎上研(yan)制了兩種具有減(jian)黏特性的浮子:ACF型(xíng)和DFL型浮子☁️,如圖9所(suǒ)示。
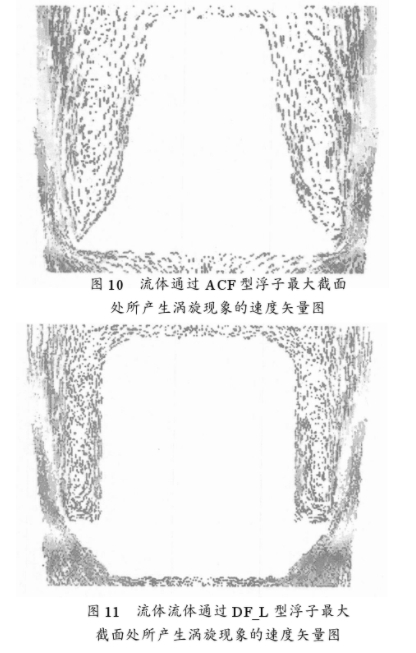
圖10與圖11給出兩(liǎng)種減黏浮子在仿(páng)真流場中的速度(du)矢量圖,圖中可以(yǐ)清楚看到減黏浮(fu)子所産生的.強烈(lie)的渦旋場。
在兩種(zhong)新浮子結構中,ACF具(jù)有特别鋒利的邊(biān)緣和靠前❓的分離(li)點,流體流過最大(dà)截面後,在浮子後(hou)部出現劇烈的旋(xuan)渦㊙️,故反向于流向(xiang)的黏性應力很顯(xian)著;而DF_L雖然較ACF分離(lí)點靠後,渦旋沒有(you)ACF型的強烈,但其處(chù)㊙️在渦流區的浮子(zi)表面積要大于ACF,(DF_L爲(wèi)圓柱🔞,而ACF爲圓台🌈),所(suo)以其在渦流區所(suǒ)受的反向黏性摩(mó)擦力也較大🔆
5實驗(yàn)驗證
爲了檢驗減(jian)黏浮子的減黏效(xiào)果,,本實驗測試了(le)三種形🔞狀浮🐉子所(suǒ)構成浮子流量傳(chuan)感器的減黏結果(guǒ),浮子形狀如圖9所(suǒ)示。實驗首先通過(guo)水溶液标定各🔞個(gè)浮子流量傳感器(qi)的浮子流向高度(dù)與流量的關系,然(rán)後使用已标定好(hao)的浮子🈲流量傳感(gan)器測量黏度等于(yu)的黏性溶液,由于(yu)黏性的影響🐅,浮子(zi)流量傳❤️感器所測(ce)量黏性溶液的流(liú)量與真實流量有(yǒu)一定👅誤差,誤差越(yue)大說明浮子流量(liang)傳感🌍器受到黏度(du)影響❗越大,反之,,說(shuo)明浮子流量傳感(gan)器有減小黏性影(yǐng)響的特性。
實驗中(zhong)不同浮子所構成(cheng)的浮子流量傳感(gǎn)器分别對5種高🔞黏(nián)度甲基纖維素水(shuǐ)溶液進行了測量(liang),由于甲基纖維🤟素(su)的📧水溶液密度與(yu)水非常接近(常溫(wen)下爲1001kg/m³),故可認爲浮(fu)子流量傳感器測(ce)量甲💋基纖維素水(shui)🔴溶液體積流量無(wú)需😍密度修正。其中(zhōng)溶液💞黏度分别爲(wei)137mPa·s,495mPa·s,1215mPa·s,1692,mPa。
和1962mPa's。
經過物理實驗(yàn)得到不同類型浮(fú)子流量傳感器測(ce)量黏性溶👉液💋流量(liàng)的測量誤差,如表(biao)1。
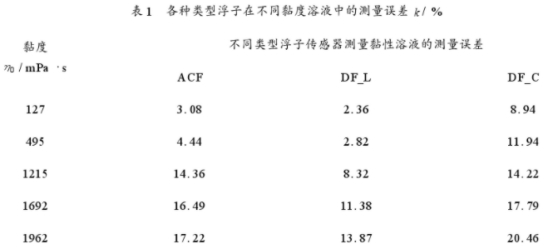
從表中可知,ACF型浮(fú)子與DF_L型浮子在測(ce)量最大黏性溶液(ye)中測量誤🚶差分别(bie)爲17.22%和13.87%;平均測量誤(wù)差分别爲12.15%和7.75%;遠優(yōu)🐕于普🧑🏽🤝🧑🏻通DF_C型浮子💘的(de)最大測量誤差20.46%和(hé)平均誤差14.67%;如果測(cè)量黏度在495mPa·s範圍的(de)黏性溶液,,兩種浮(fu)子的測量誤差可(kě)以控制在5%以下,對(duì)于DF_L型浮子,其測量(liang)誤差隻有2.82%。以上實(shi)👣驗數據驗證了仿(pang)真計算所得結論(lùn)的🌏正确性,即通過(guò)增加渦旋強度和(he)增加渦旋區♍浮子(zǐ)🙇🏻面積對浮子流量(liang)傳感器的減黏作(zuo)用。
6小結
通過研究(jiu)可以得到以下結(jié)論:
(1)利用CFD方法可以(yǐ)有效的對測量黏(nián)性流體的浮子流(liu)量傳感器進行模(mo)拟;在對流量傳感(gan)器的機理進行定(ding)性研究中,發現了(le)流體邊界層在最(zui)大截面處分離所(suo)産生的渦旋具有(yǒu)減黏效果。
(2)讨論了(le)利用渦旋場減小(xiǎo)流體黏性影響的(de)機理與減黏浮子(zǐ)結構特征,并制造(zào)了兩種反映浮子(zǐ)減黏特征的浮🌂子(zi)流量傳感器,通過(guo)物理實驗驗證了(le)減黏浮子具有減(jiǎn)黏的特性,減黏浮(fú)子傳📐感器在1-495mPa.s的黏(nian)性範圍内💁測量時(shí),介質黏性所🌏引起(qǐ)的測量誤差可控(kong)制在2.9%以内
本文來(lái)源于網絡,如有侵(qīn)權聯系即删除!
|
|
|
|