|
聯系方式(shì) |
| 電話(市場部): |
| (拓(tuò)展部): |
| 傳真: |
| 節假(jia)日商務聯系電(dian)話: 何經理: 劉經(jīng)理: |
| 郵編:211600 |
| 網址:/ |
| http://banyunshe.cc/ |
| E-mail:[email protected] |
| 地(di)址:江蘇省金湖(hu)縣工業園區環(huán)城西 路269号 |
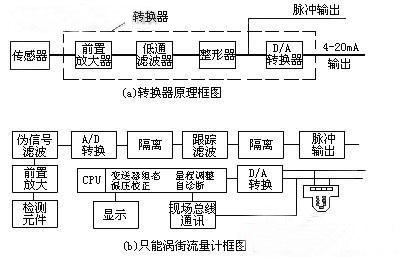
| 您現(xiàn)在的位置 > 首頁(ye) > 行業新聞 > 智能(neng)渦街流量計原(yuan)理與故障排除(chu) |
|