0引(yin)言
流量(liang)是現代(dai)工業測(ce)量過程(chéng)中的一(yi)個重要(yào)參數,渦(wo)輪流量(liang)傳感器(qì)
渦輪轉(zhuan)子輕、慣(guan)性小,因(yin)此測量(liang)精度高(gāo)、量程範(fan)圍寬、重(zhòng)❗複😘性㊙️與(yǔ)動态特(tè)性好[1]。因(yīn)此,各國(guo)的發動(dòng)機試車(chē)台多使(shǐ)🧑🏽🤝🧑🏻用渦輪(lun)流量傳(chuán)感器測(ce)量發動(dòng)機燃油(you)流量[2]。渦(wō)輪流量(liang)傳感器(qi)🏃🏻♂️屬于速(sù)度式流(liú)📞量儀表(biǎo),當被測(cè)流體流(liu)過傳感(gǎn)器時,在(zài)流體作(zuò)用下,葉(ye)輪受力(li)❤️而旋轉(zhuan),轉速與(yu)管道内(nèi)流體流(liu)速成正(zheng)比,葉輪(lun)轉動後(hòu)周期性(xing)地改變(biàn)磁電轉(zhuan)換器的(de)磁阻值(zhi),檢測線(xian)圈中的(de)磁通随(suí)之發生(shēng)周期性(xing)變化,産(chǎn)生周期(qi)性的感(gan)應電勢(shi),即電脈(mò)沖信号(hào)[3],流量傳(chuán)😘感器輸(shu)出的脈(mo)沖信号(hào)頻率代(dài)表流量(liang)大小,流(liu)量與信(xìn)号頻率(lǜ)在一定(ding)區間内(nèi)近似成(chéng)線性關(guan)系[4]。無人(rén)機燃油(you)消耗量(liàng)屬重要(yao)參數,測(cè)量意義(yì)重大,有(yǒu)🌍利于正(zhèng)确飛行(hang)方案,有(you)效提高(gāo)載油利(lì)用率[5]。在(zai)進行無(wu)人機燃(ran)油流量(liàng)檢查過(guò)程中,發(fa)動機在(zài)低速狀(zhuàng)💃🏻态下開(kai)車,燃油(yóu)流量測(cè)量不準(zhǔn)㊙️确。本文(wen)主要對(duì)此故障(zhàng)進行仿(páng)真分析(xī)及試驗(yàn)驗證。
1測(cè)量原理(li)
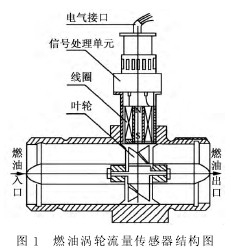
1.1工作原(yuan)理由于(yú)葉輪的(de)葉片與(yu)流向有(you)一定角(jiao)度,當燃(rán)油沖👌擊(ji)渦💃輪轉(zhuan)子時,流(liu)體的沖(chong)擊作用(yòng)産生推(tui)動力矩(ju),克服流(liú)量傳感(gan)🔞器支撐(chēng)軸承與(yu)轉子之(zhi)間的機(jī)械摩擦(cā)✨力矩以(yǐ)及由于(yu)流體粘(zhān)性作用(yòng)産生的(de)液體阻(zu)力之後(hòu)使轉子(zǐ)開始運(yùn)動[1],渦輪(lún)流量傳(chuán)感器結(jie)構原理(li)如圖1所(suǒ)🏃🏻示。
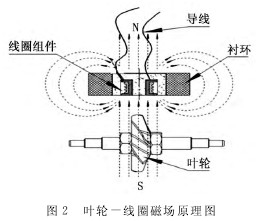
在葉(yè)輪上的(de)磁鐵産(chan)生磁場(chang),固定在(zai)傳感器(qì)内部的(de)線圈組(zǔ)件處于(yu)磁場中(zhong),如圖2所(suo)示,當燃(ran)油通過(guo)傳感器(qì)内腔後(hòu),燃油的(de)流速驅(qu)🔞動葉輪(lún)旋轉,帶(dai)動葉輪(lun)上的磁(cí)鐵旋轉(zhuǎn),此時線(xian)圈組件(jiàn)感應的(de)磁通量(liàng)也周期(qi)發生變(biàn)化。
根據電(diàn)磁感應(ying)原理,線(xian)圈的磁(cí)通量發(fa)生變化(hua),相應産(chǎn)生感應(ying)電勢:
![]()
N爲(wei)線圈的(de)匝數,ΔΦ爲(wèi)磁通量(liàng)變化,ΔT爲(wei)變化時(shí)間。因此(ci),燃油流(liu)㊙️過渦輪(lun)流量傳(chuan)感器時(shi),線圈會(huì)産生周(zhou)期變化(hua)電壓❗,即(ji)葉輪轉(zhuǎn)動一圈(quan),就會感(gan)應出一(yi)個正弦(xian)信号,葉(yè)輪連續(xu)轉動,就(jiù)會周期(qi)的産生(sheng)正弦信(xìn)号。經過(guo)信号處(chù)理轉換(huan)爲脈沖(chong)信号,渦(wo)輪💋流量(liang)傳感器(qi)穩定運(yùn)行輸出(chu)的脈沖(chong)頻率與(yǔ)流經流(liú)量傳感(gǎn)器的流(liú)量理🌈論(lùn)關系如(ru)下[6]:
![]()
Q爲通(tōng)過渦輪(lún)流量傳(chuan)感器的(de)體積流(liu)量(L/s),f爲脈(mo)沖信号(hao)頻率(Hz),k爲(wei)儀表系(xì)數(1/L)。
信号(hao)處理單(dan)元主要(yao)實現交(jiāo)流信号(hào)處理及(ji)數據通(tong)信💚,首先(xian)将交流(liu)信号轉(zhuan)爲脈沖(chòng)信号,其(qí)次單片(pian)機控制(zhi)器👉通過(guo)光耦電(diàn)氣隔離(li)采集并(bìng)計算脈(mò)沖頻率(lü),依據标(biāo)定的流(liu)量📞和頻(pín)率關系(xì)計算相(xiàng)應燃油(you)流量,最(zuì)後将數(shù)據寫入(ru)串口🌐通(tong)信模塊(kuai)🈲,經由電(dian)氣接口(kou)發至機(jī)載計算(suan)機😘。
1.2信号(hao)轉換及(jí)處理
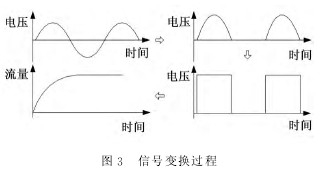
渦(wō)輪流量(liang)傳感器(qi)中的葉(yè)輪旋轉(zhuan)時,線圈(quan)周期産(chǎn)生幅值(zhi)🧑🏾🤝🧑🏼爲✌️數十(shi)毫安至(zhi)數百毫(háo)安的微(wēi)小交流(liú)信号,經(jing)過第一(yi)級運算(suan)放大器(qì)将微小(xiǎo)交流信(xin)号進行(háng)放大并(bing)限幅,消(xiāo)除幅✏️值(zhi)爲負的(de)信号。再(zài)經過第(di)二級比(bǐ)較器,比(bi)較電壓(yā)爲零,輸(shu)入電壓(ya)大于零(líng)時,輸出(chū)高電平(píng),否則輸(shu)出低電(diàn)平,即将(jiāng)交流信(xin)号轉換(huan)爲脈沖(chong)信号。脈(mo)沖經過(guo)光耦進(jin)行電氣(qì)隔離,電(diàn)信号單(dān)向傳輸(shū),由單片(piàn)機采✉️集(jí)光耦信(xìn)号輸出(chū)的通斷(duàn)🔱頻率,即(ji)爲原始(shi)🈲信号頻(pin)率值,再(zai)通過預(yu)先标定(ding)的頻率(lǜ)⁉️與流量(liang)關系,計(ji)算可得(de)🤩原始信(xin)号對應(yīng)的燃油(yóu)流量,信(xìn)号轉換(huàn)過程如(ru)圖3所示(shì)。
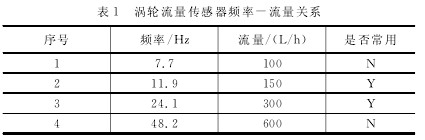
在(zài)渦輪流(liu)量傳感(gan)器标定(dìng)試驗台(tái)中進行(háng)傳感器(qi)标定,針(zhēn)對主流(liú)🧡量點(100L/h、150L/h、300L/h、600L/h)輸(shu)入相應(yīng)流量的(de)燃油流(liú)經渦輪(lún)🤟傳感器(qi),使用頻(pin)⭐率采集(ji)設備測(cè)量脈沖(chong)頻率,并(bing)輸入的(de)流量與(yu)采集到(dào)的頻率(lǜ)相關聯(lian),得到表(biao)1中标定(dìng)結果。
2故(gu)障現象(xiang)通過地(di)面電源(yuán)爲設備(bei)上電後(hòu),發動機(ji)在💃🏻低轉(zhuan)速狀态(tài)🏃下開車(che),在地面(miàn)控制站(zhan)人機交(jiāo)互界面(mian)查看😄到(dào)燃油流(liú)量在500L/h~1500L/h跳(tiào)動👨❤️👨,已經(jing)超過傳(chuan)感器實(shí)際測量(liàng)範圍,此(ci)時理論(lun)值:
應爲(wei)80L/h~100L/h。通過分(fèn)析飛參(cān)記錄設(she)備中的(de)數據,得(de)到圖4中(zhong)曲線☁️。
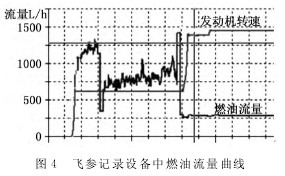
由(yóu)曲線可(ke)以看出(chū),在發動(dong)機未起(qǐ)動時,燃(ran)油流量(liàng)爲0L/h,故障(zhàng)未出現(xiàn)㊙️;在發動(dong)機起動(dong)至最低(dī)轉速時(shi),燃油流(liu)量出現(xian)異常,在(zài)🍉500L/h~1500L/h随機跳(tiao)動;在轉(zhuan)速達到(dào)最大轉(zhuǎn)速時,燃(ran)油流量(liang)爲260L/h,故👌障(zhang)消失。
通(tōng)過分析(xi)燃油渦(wō)輪流量(liang)傳感器(qì)工作原(yuán)理及現(xian)場環境(jìng),出現🌍上(shang)述故障(zhàng)原因可(kě)能爲外(wai)界磁場(chǎng)耦合進(jin)渦輪流(liu)量傳感(gan)器線🐇圈(quān),使🔆得原(yuan)始微小(xiao)交流信(xin)号混入(ru)幹擾🏃🏻♂️信(xìn)号,且此(ci)時信🔴噪(zao)比較低(di),幹擾信(xìn)号起主(zhǔ)導作用(yòng),信号處(chù)理單元(yuán)💁将混入(rù)幹擾的(de)信号處(chù)理後計(ji)算得到(dào)的頻率(lü)較高,由(yóu)脈沖頻(pín)率與燃(ran)油流量(liang)成線🧑🏾🤝🧑🏼性(xing)對應關(guan)系,即會(hui)出現較(jiao)大的燃(ran)油流量(liàng)。
3建模仿(pang)真及驗(yan)證
3.1建模(mo)仿真
爲(wèi)進一步(bu)分析故(gù)障原因(yin),根據渦(wō)輪流量(liang)傳感器(qi)的信号(hao)轉📧換♊過(guo)程建立(li)邏輯模(mó)型,在不(bu)同頻率(lü)段加入(ru)頻率💃🏻爲(wei)50Hz的外界(jie)幹擾,查(chá)看脈沖(chong)頻率變(biàn)化情況(kuang)。
将表1中(zhōng)數據拟(ni)合爲線(xian)性函數(shu),得到如(ru)下燃油(you)渦輪🔆流(liu)量傳♈感(gan)🚩器産生(sheng)脈沖的(de)頻率和(he)燃油流(liú)量的關(guān)系🐕:
![]()
燃油(you)流量産(chǎn)生的微(wei)小交流(liu)信号爲(wei):![]()
假定外(wai)界電磁(cí)幹擾作(zuo)用于渦(wo)輪流量(liàng)傳感器(qi)産生的(de)幹擾爲(wèi):![]()
渦輪傳(chuan)感器線(xiàn)圈輸出(chu)信号爲(wei):![]()
限幅後(hou)的信号(hào)爲:
轉換(huàn)爲脈沖(chong)信号: Max爲(wei)脈沖幅(fu)值。
Max爲(wei)脈沖幅(fu)值。
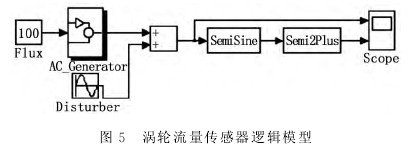
基于(yu)simulink建立燃(ran)油渦輪(lun)流量傳(chuán)感器的(de)邏輯模(mo)型,如圖(tú)5所示。由(you)于S-function可以(yi)用連續(xu)或離散(san)狀态方(fang)程描述(shù)動态系(xi)統🤞模塊(kuài)🛀,因此,渦(wō)輪流量(liang)傳感器(qi)線圈磁(cí)-電轉換(huàn)、波形限(xiàn)幅、交流(liu)轉脈沖(chòng)等模塊(kuài)基于M-file模(mo)闆編寫(xiě)S-function來實現(xiàn)[7-8]。
分(fen)别設定(ding)理論燃(ran)油流量(liàng)爲表1中(zhōng)标定的(de)下限100L/h和(hé)上限600L/h,渦(wō)輪流量(liàng)傳感器(qì)信号輸(shū)出及脈(mo)沖輸出(chū)如圖6所(suǒ)示。
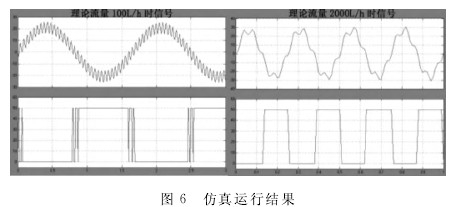
仿真結(jie)果表明(míng),在低流(liú)量時,渦(wō)輪流量(liàng)傳感器(qì)原始微(wei)小交⁉️流(liu)‼️信号過(guo)零比較(jiào)處,脈沖(chòng)頻率較(jiào)高,且幅(fu)值不穩(wen)定。而🌈在(zai)高流量(liàng)時,脈📧沖(chòng)信号頻(pin)率與真(zhēn)實信号(hào)頻率相(xiang)近,幅值(zhi)♈穩定。
仿(páng)真結果(guo)與故障(zhang)現象一(yi)緻,初步(bu)推斷渦(wō)輪流量(liàng)傳感器(qi)📱故⛷️障📞原(yuan)因爲外(wai)界磁場(chang)幹擾。
3.2
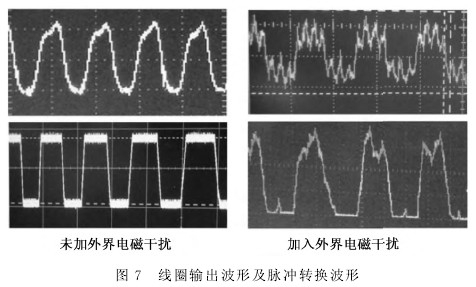
驗(yàn)證試驗(yan)爲确定(ding)故障原(yuan)因,在燃(ran)油測試(shi)台中進(jìn)行驗證(zheng)🏃♂️試♌驗,設(shè)定供給(gei)至渦輪(lun)流量傳(chuan)感器的(de)燃油真(zhen)實流量(liang)爲90L/h,通過(guò)繼電🏃♂️器(qì)控制外(wai)置線圈(quān)通/斷電(diàn),頻率爲(wei)50 Hz,模拟外(wài)界電磁(ci)幹擾,分(fèn)别用兩(liang)台示波(bo)器檢測(cè)到渦輪(lún)流量🚶♀️傳(chuán)感器線(xiàn)圈輸出(chū)信号和(hé)脈沖輸(shū)出信号(hao)🈲,如圖7所(suo)示。
試驗(yàn)結果表(biǎo)明,在未(wèi)加入外(wai)界幹擾(rao)時,原始(shǐ)微小交(jiāo)流信号(hào)及脈沖(chong)信号電(diàn)氣特性(xìng)良好,脈(mo)沖最高(gao)幅值穩(wěn)定,光耦(ǒu)可以正(zheng)常🈲通/斷(duan)☂️,單片機(jī)計算得(dé)出脈沖(chong)信♉号頻(pín)率值。而(ér)加入外(wai)界☂️幹擾(rao)後,原始(shǐ)信号出(chu)現明顯(xiǎn)🈲畸變,幅(fú)值在22mV左(zuo)右,轉換(huàn)脈沖信(xìn)号最高(gāo)幅值不(bu)穩定❗ (1.7V~1.0V),且(qie)最低幅(fu)值亦有(you)突變,導(dǎo)緻光耦(ǒu)出現異(yi)常通/斷(duan),最終導(dǎo)緻單片(piàn)機計算(suàn)出的頻(pin)率較真(zhēn)實圖7線(xian)圈輸出(chu)波形及(jí)脈沖轉(zhuǎn)換波形(xíng)頻率較(jiao)高,在500L/h~1 500L/h之(zhī)間跳動(dòng)。
經進一(yī)步分析(xi),由于葉(yè)輪的機(ji)械特性(xìng),在高流(liú)量段工(gōng)作時,葉(yè)輪轉速(su)和燃油(yóu)流量成(cheng)線性的(de)正比關(guan)系,在低(dī)流量段(duàn)工作時(shí),葉輪轉(zhuan)速和燃(ran)油流量(liang)成非線(xiàn)性的關(guan)系,流量(liàng)越小,轉(zhuan)速下降(jiang)得越快(kuai)。供油管(guan)路的燃(ran)油流量(liang)在低流(liú)量🐉段時(shi),傳感器(qì)葉輪的(de)轉速會(hui)降得很(hěn)低,線圈(quān)的感應(ying)電勢E會(huì)跟着變(bian)小,即信(xìn)号的電(dian)壓呈非(fei)線性的(de)加速下(xia)降,這說(shuō)明傳感(gan)器已經(jīng)工作在(zài)非線性(xìng)流量段(duàn),由于葉(yè)輪轉速(sù)太低,感(gan)應的信(xin)号很🔱弱(ruò)小,在存(cún)在電源(yuán)噪聲和(he)幹擾的(de)情💞況下(xia),信号處(chu)理單元(yuán)無💔法區(qū)分真實(shi)信号和(hé)幹擾信(xìn)号,導緻(zhì)燃油測(cè)量不準(zhǔn)确。
4 結束(shù)語
針對(dui)燃油渦(wō)輪流量(liang)傳感器(qi)在低流(liu)量段出(chu)現流量(liàng)不準确(què)👈的故障(zhàng),分析了(le)其工作(zuo)原理及(jí)信号轉(zhuǎn)換過程(chéng),建立了(le)其邏輯(jí)模🏃♀️型,最(zui)後,進行(hang)了故障(zhang)仿真及(jí)驗證試(shi)驗。最終(zhōng)确定了(le)故障原(yuán)因🔴爲外(wai)界磁場(chǎng)幹擾,排(pái)除故障(zhàng)可考慮(lü)以下兩(liang)種措施(shi):
1)在渦輪(lun)流量傳(chuán)感器中(zhōng)設計電(diàn)磁屏蔽(bì)結構,阻(zǔ)止外界(jie)電🔞磁幹(gàn)擾耦合(hé)進線圈(quān);
2)信号處(chù)理單元(yuan)中的采(cai)用滞回(huí)比較器(qì)電路,可(kě)以過濾(lü)外界幹(gan)🌐擾造成(chéng)的電壓(ya)波動。
以(yi)上内容(róng)來源于(yú)網絡,如(ru)有侵權(quán)請聯系(xì)即删除(chu)!